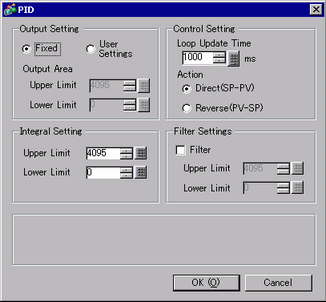
Double-click the PID instruction to specify the PID variables.
Output Setting (Range of Operand D1)
Specifies the upper and lower limits for the output value. The result of the calculation must be within this range.
Fixed
The Output range is 0 to 4095.
User setting
Specify the output range as required.
Range for the Upper Limit = Lower Limit +1 to 32767
Range for the Lower Limit = 0 to Upper Limit minus 1
Integral Setting
Specifies the upper and lower limits for the integral settings.
Control Setting
Frequency
Sets the temporal frequency of obtaining S2 data. The frequency of obtaining data is also the frequency of updating the D1 output.
You can use the filtering feature to specify the frequency. The sampling frequency must be larger than the frequency of obtaining data.
Setting Range: 10 to 65535 ms
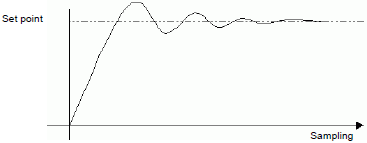
Action
Positive Movement (S1 - S2)
Used to control the increase in operation volume when the process variable is smaller than the setpoint.
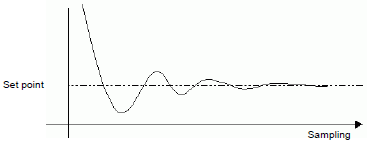
Reverse Movement (S2 - S1)
Used to control the increase in operation volume when the process variable is larger than the setpoint.
Filter Settings
Specifies the upper and lower limits for the output value. If the value exceeds the range, the value will be output as either the upper or lower limit. When the value exceeds the range, the bits that indicate you exceeded the upper limit or lower limit (VariableName.TO, VariableName.UO) turn ON.
Settings Range: Dependent on the Output Settings Range
Upper Limit
Output Settings Range (upper limit) to 32767
Lower Limit
Output Settings Range (lower limit) to -32768